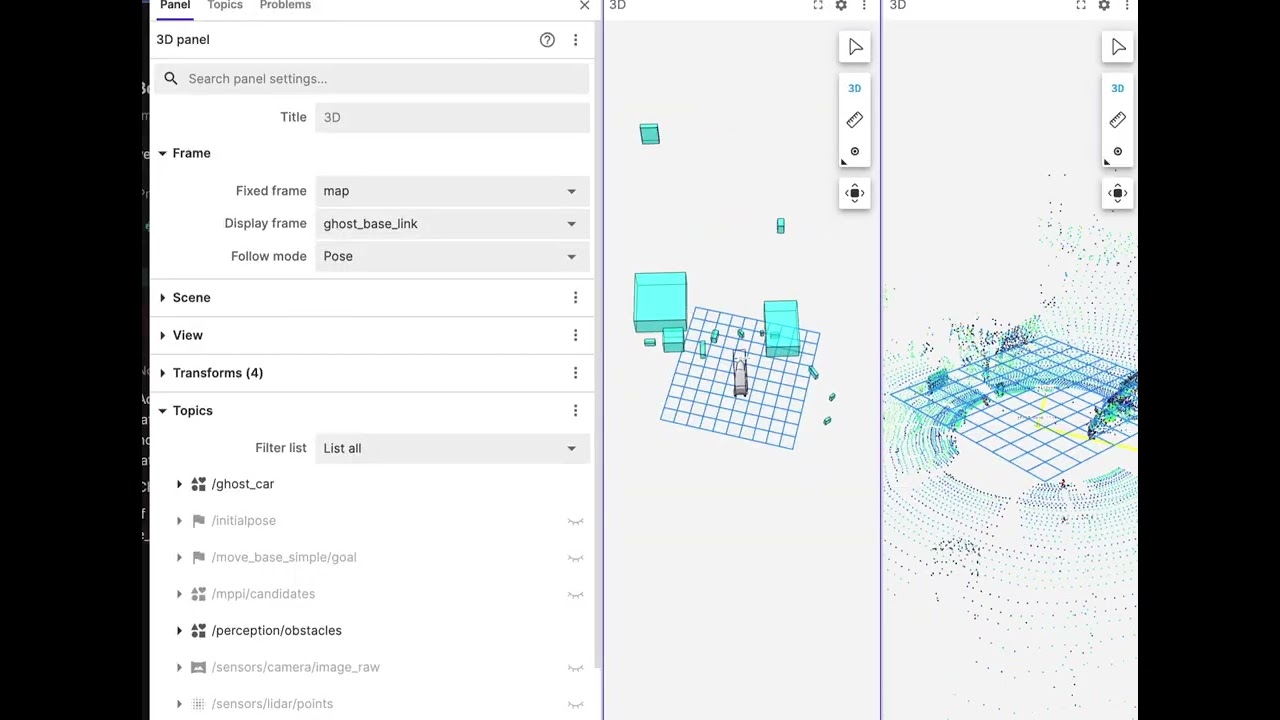
See it think and move.
Closed-loop testing of the perception and control stack on the EMC Squared platform.
Phase 1: the Momentum Gate.
A strict four-stage validation pipeline that de-risks perception and control before public-road deployment.
Static tensor validation
Locking in deterministic perception across the six-camera array and tracking the distance of static obstacles inside a 10-meter radius.
ActiveDynamic shadow mode
Tracking moving obstacles at 5–10 mph with zero tracking drops, proving the system handles live urban motion on edge hardware.
Next upClosed-loop actuation
Wiring validated perception into the drive-by-wire system to trigger autonomous, low-speed automatic emergency braking.
QueuedGeofenced autonomy alpha
Full autonomous path-following and cornering inside a bounded 25×25 m zone — proving control under three-wheel lateral dynamics.
QueuedThe path to driverless delivery.
Five phases, each one generating real data and de-risking hardware on the way to a scalable commercial fleet.
Closed-loop ADAS validation
Validate the camera perception stack and low-speed drive-by-wire actuation.
Sensor fusion & autopilot
Integrate LiDAR for HD-map localization and comprehensive Level 4 capabilities.
Fleet beta & shadow telemetry
Deploy a limited test fleet to harvest human-driven field data and train edge-case models.
Regulatory validation
Complete ISO-compliant safety cases and secure local operating permits for driverless deployment.
General availability
Launch commercial, fully unmanned three-wheelers in USA markets.
Want to follow the autonomy program up close?
Book a session to see the platform, the perception stack, and where the roadmap goes next.
Learn moreEMC Squared's autonomy platform is under active development. Stage, phase, and performance figures describe an in-progress engineering roadmap and development targets, not the current capabilities of a publicly available driverless vehicle.